2 Klassische Mechanik
Die klassische Mechanik behandelt Massenpunkte, also Massen ohne räumliche Ausdehnung, die sich mit Geschwindigkeiten $\ll c$ bewegen (Übergang zur Relativitätstheorie) und nicht zu leicht sind (Übergang zur Quantenmechanik).
2.1 Newton'sche Mechanik
Die klassische Mechanik baut auf Newtons Axiomen auf [18]. Das wichtigste Axiom ist das Zweite Newton'sche Axiom:
Der Impuls ist dabei definiert durch
\[ \begin{align} \mathbf{p} \coloneqq m\frac{d\mathbf{r}}{dt}, \end{align} \]
wobei $\mathbf{r} = \mathbf{r}\left(t\right)$ die Bahnkurve des Massenpunktes ist. Das Erste Axiom ist ein Spezialfall des zweiten und somit unbedeutend. Das Dritte Newton'sche Axiom lautet:
Seien zwei Massen $m_1$ und $m_2$ gegeben. Seien $\mathbf{F}_1$ und $\mathbf{F}_2$ die Kräfte auf die Massen aufgrund der paarweisen Wechselwirkung (WW). Dann gilt \[ \begin{align} \mathbf{F}_1 = -\mathbf{F}_2. \end{align} \]
Um die Theorie zu vervollständigen, führt man weiterhin zwei Zusätze zu den Newton'schen Axiomen ein. Zunächst legt man fest, dass, wenn $N \geq 1$ Kräfte $\mathbf{F}_j$ auf einen Massenpunkt wirken, in Glg. (2.1) die Summe dieser Kräfte einzusetzen ist:
\[ \begin{align} m\frac{d^2\mathbf{r}}{dt^2} = \sum_{j = 1}^{N}\mathbf{F}_j \end{align} \]
Darüber hinaus geht man davon aus, dass die Kraft $\mathbf{F}_1$ parallel zur Verbindungslinie $\mathbf{r}_1 - \mathbf{r}_2$ ist:
\[ \begin{align} \mathbf{F}_1 \parallel \mathbf{r}_1 - \mathbf{r}_2 \end{align} \]
Seien zwei Punktmassen $m_1, m_2$ an den Orten $\mathbf{r}_1, \mathbf{r}_2$ gegeben. Man definiert den Schwerpunkt $\mathbf{R}$ durch
\[ \begin{align} \mathbf{R} \coloneqq \frac{m_1\mathbf{r}_1 + m_2\mathbf{r}_2}{M} \end{align} \]
mit der Gesamtmasse
\[ \begin{align} M \coloneqq m_1 + m_2. \end{align} \]
Für die Beschleunigung des Schwerpunktes gilt nach dem Zweiten Newton'schen Axiom
\[ \begin{align} \frac{d^2\mathbf{R}}{dt^2} = \frac{m_1\frac{d^2\mathbf{r}_1}{dt^2} + m_2\frac{d^2\mathbf{r}_2}{dt^2}}{M} = \frac{1}{M}\left(\mathbf{F}_1 + \mathbf{F}_2\right), \end{align} \]
wobei $\mathbf{F}_1$ die auf $m_1$ wirkende und $\mathbf{F}_2$ die auf $m_2$ wirkende Gesamtkraft darstellt. Diese kann man jeweils aufteilen in eine interne und in eine externe Kraft:
\[ \begin{align} \mathbf{F}_1 &= \mathbf{F}_1^{\text{(int)}} + \mathbf{F}_1^{\text{(ext)}}, & {} & \mathbf{F}_2 = \mathbf{F}_2^{\text{(int)}} + \mathbf{F}_2^{\text{(ext)}} \end{align} \]
Die interne Kraft entsteht dabei durch Wechselwirkungen innerhalb des Systems. Aufgrund des Dritten Newton'schen Axioms gilt
\[ \begin{align} \mathbf{F}_1^{\text{(int)}} = -\mathbf{F}_2^{\text{(int)}}. \end{align} \]
Man erhält also
\[ \begin{align} \frac{d^2\mathbf{R}}{dt^2} = \frac{1}{M}\left(\mathbf{F}_1^{\text{(ext)}} + \mathbf{F}_2^{\text{(ext)}}\right). \end{align} \]
Es gilt also eine Art Zweites Newton'sches Axiom
\[ \begin{align} M\frac{d^2\mathbf{R}}{dt^2} = \sum_{i}^{}\mathbf{F}_i^{\text{(ext)}} \end{align} \]
für die Bewegung der Schwerpunktkoordinate. Man führt analog die Relativkoordinate
\[ \begin{align} \mathbf{r} \coloneqq \mathbf{r}_2 - \mathbf{r}_1 \end{align} \]
ein. Diese erfüllt die Bewegungsgleichung
\[ \begin{align} \frac{d^2\mathbf{r}}{dt^2} = \frac{d^2\mathbf{r}_2}{dt^2} - \frac{d^2\mathbf{r}_1}{dt^2} = \frac{\mathbf{F}_1}{m_1} - \frac{\mathbf{F}_2}{m_2}\Leftrightarrow \frac{m_1m_2}{m_1 + m_2}\frac{d^2\mathbf{r}}{dt^2} = \frac{m_2}{m_1 + m_2}\mathbf{F}_1 - \frac{m_1}{m_1 + m_2}\mathbf{F}_2. \end{align} \]
Nimmt man nun ausschließlich interne WW an, erhält man
\[ \begin{align} \mu\frac{d^2\mathbf{r}}{dt^2} = \mathbf{F}_1^{\text{(int)}}. \end{align} \]
Hierbei wurde die reduzierte Masse
\[ \begin{align} \mu \coloneqq \frac{m_1m_2}{M} \end{align} \]
eingeführt. Bei verschwindenden externen Kräften bewegt sich also effektiv eine Masse $\mu$ im Kraftfeld der paarweisen WW, ihr Ortsvektor ist $\mathbf{r}$. Einige der Ergebnisse gelten auch bei $N\in\mathbb{N}$ mit $N\geq 1$ Teilchen. Es lassen sich zunächst eine Gesamtmasse
\[ \begin{align} M \coloneqq \sum_{i = 1}^{N}m_i \end{align} \]
sowie eine Schwerpunktkoordinate
\[ \begin{align} \mathbf{R} \coloneqq \frac{\sum_{i = 1}^{N}m_i\mathbf{r}_i}{M} \end{align} \]
definieren. Man leitet dies zweimal zeitlich ab und erhält
\[ \begin{align} M\frac{d^2}{dt^2}\mathbf{R} = \sum_{i = 1}^{N}m_i\frac{d^2}{dt^2}\mathbf{r}_i = \sum_{i = 1}^{N}\mathbf{F}_i. \end{align} \]
Es gilt wieder
\[ \begin{align} \mathbf{F}_i = \mathbf{F}_i^{\text{(int)}} + \mathbf{F}_i^{\text{(ext)}} = \sum_{\substack{j = 1,\\j\not = i}}^{N}\mathbf{F}_i^{(j)} + \mathbf{F}_i^{\text{(ext)}}. \end{align} \]
Hierbei ist $\mathbf{F}_i^{(j)}$ die Kraft, die das $j-$te Teilchen auf das $i-$te Teilchen ausübt. Somit erhält man
\[ \begin{align} \sum_{i = 1}^{N}\mathbf{F}_i = \sum_{\substack{i, j = 1,\\i\not = j}}^{N}\mathbf{F}_i^{(j)} + \sum_{i = 1}^{N}\mathbf{F}_i^{\text{(ext)}} = \sum_{\substack{i, j = 1,\\i>j}}^{N}\mathbf{F}_i^{(j)} + \mathbf{F}_j^{(i)} + \sum_{i = 1}^{N}\mathbf{F}_i^{\text{(ext)}} = \sum_{\substack{i, j = 1,\\i>j}}^{N}\mathbf{F}_i^{(j)} - \mathbf{F}_i^{(j)} + \sum_{i = 1}^{N}\mathbf{F}_i^{\text{(ext)}} = \sum_{i = 1}^{N}\mathbf{F}_i^{\text{(ext)}}. \end{align} \]
Hierbei wurde das Dritte Newton'sche Axiom
\[ \begin{align} \mathbf{F}_i^{(j)} = -\mathbf{F}_j^{(i)} \end{align} \]
eingesetzt. Dies bedeutet: Die internen WWen haben keinen Einfluss auf die Trajektorie des Schwerpunktes. Wirken keine externen Kräfte, ist der Gesamtimpuls konstant, man spricht vom Impulserhaltungssatz.
Es existiert eine Formulierung der Newton'schen Mechanik für Rotationen (Drehbewegungen). Der Drehimpuls $\mathbf{L}$ eines Teilchens wird definiert durch
\[ \begin{align} \mathbf{L} \coloneqq \mathbf{r}\times\mathbf{p}.\tag{2.23}\label{eq:def_angular_momentum} \end{align} \]
Das Drehmoment $\mathbf{F}$ ist definiert als
\[ \begin{align} \mathbf{D} \coloneqq \mathbf{r}\times\mathbf{F}. \end{align} \]
Durch Ableiten von Glg. (2.23) folgt
\[ \begin{align} \frac{d}{dt}\mathbf{L} = \frac{d\mathbf{r}}{dt}\times\mathbf{p} + \mathbf{r}\times\frac{d\mathbf{p}}{dt} = \mathbf{r}\times\mathbf{F} = \mathbf{D}. \end{align} \]
Dies bezeichnet man auch als Zweites Newton'sches Axiom der Rotation. Für $N\in\mathbb{N}$ mit $N\geq 1$ Teilchen erhält man einen Gesamtdrehimpuls von
\[ \begin{align} \mathbf{L} = \sum_{i = 1}^{N}\mathbf{L}_i = \sum_{i = 1}^{m}\mathbf{r}_i\times\mathbf{p}_i. \end{align} \]
Für diesen gilt
\[ \begin{align} \frac{d\mathbf{L}}{dt} &= \sum_{i = 1}^{N}\mathbf{r}_i\times\left(\mathbf{F}_i^{\text{(int)}} + \mathbf{F}_i^{\text{(ext)}}\right) = \sum_{\substack{i, j = 1,\\i\not = j}}^{N}\mathbf{r}_i\times\mathbf{F}_i^{(j)} + \sum_{i = 1}^{N}\mathbf{r}_i\times\mathbf{F}_i^{\text{(ext)}}\nonumber\\ &= \sum_{\substack{i, j = 1,\\i>j}}^{N}\mathbf{r}_i\times\mathbf{F}_i^{(j)} + \mathbf{r}_j\times\mathbf{F}_j^{(i)} + \sum_{i = 1}^{N}\mathbf{r}_i\times\mathbf{F}_i^{\text{(ext)}} = \sum_{\substack{i, j = 1,\\i>j}}^{N}\mathbf{F}_i^{(j)}\times\left(\mathbf{r}_i - \mathbf{r}_j\right) + \sum_{i = 1}^{N}\mathbf{r}_i\times\mathbf{F}_i^{\text{(ext)}}\nonumber\\ &= \sum_{i = 1}^{N}\mathbf{r}_i\times\mathbf{F}_i^{\text{(ext)}}. \end{align} \]
Es wurde wieder das Dritte Newton'sche Axiom eingesetzt sowie die Zusatzaussage, dass die Kraft zwischen zwei Teilchen entlang der Verbindungslinie zwischen diesen wirkt. Wirken keine externen Kräfte, ist der Drehimpuls also erhalten, man spricht vom Drehimpulserhaltungssatz.
Es soll noch das Konzept der Energie eingeführt werden. Ein Kraftfeld ist eine Funktion $\mathbf{F} = \mathbf{F}\left(\mathbf{r}\right)$, die jedem Punkt $\mathbf{r}$ eine dort wirkende Kraft $\mathbf{F}\left(\mathbf{r}\right)$ zuordnet. Ein Massenpunkt bewege sich entlang der Trajektorie $\mathbf{r} = \mathbf{r}\left(t\right)$. Dann definiert man die Arbeit $W$, die das Kraftfeld im Zeitintervall $\left[t_1, t_2\right]$ am Massenpunkt leistet, durch
\[ \begin{align} W \coloneqq \int_{t_1}^{t_2}\mathbf{F}\left(\mathbf{r}\left(t\right)\right)\cdot\frac{d\mathbf{r}}{dt}dt. \end{align} \]
Mit dem Zweiten Newton'schen Axiom und partieller Integration folgt
\[ \begin{align} W = \int_{t_1}^{t_2}m\frac{d^2\mathbf{r}}{dt^2}\cdot\frac{d\mathbf{r}}{dt}dt &= \left[m\frac{d\mathbf{r}}{dt}\cdot\frac{d\mathbf{r}}{dt}\right]_{t_1}^{t_2} - \int_{t_1}^{t_2}m\frac{d\mathbf{r}}{dt}\cdot\frac{d^2\mathbf{r}}{dt^2}dt\nonumber\\ \Leftrightarrow W &= \frac{1}{2}m\mathbf{v}\left(t_2\right)^2 - \frac{1}{2}m\mathbf{v}\left(t_1\right)^2. \end{align} \]
Definiert man die kinetische Energie $E_{\text{kin}}$ durch
\[ \begin{align} E_{\text{kin}} \coloneqq \frac{1}{2}m\mathbf{v}^2, \end{align} \]
folgt
\[ \begin{align} W = \Delta E_{\text{kin}}. \end{align} \]
Die vom Feld geleistete Arbeit wird also zu kinetischer Energie. Weiterhin nennt man ein Kraftfeld konservativ, wenn ein Potential $U = U\left(\mathbf{r}\right)$ existiert mit
\[ \begin{align} \mathbf{F} = -\nabla U. \end{align} \]
In diesem Fall gilt nach Glg. (B.47)
\[ \begin{align} \nabla\times\mathbf{F} = \mathbf{0}, \end{align} \]
somit folgt mit dem Stokes'schen Satz Glg. (15.26)
\[ \begin{align} \int_{\partial A}\mathbf{F}\cdot d\mathbf{s} = 0 \end{align} \]
für jede Fläche $A$, sodass die geleistete Arbeit vom Weg unabhängig ist. Definiert man die Gesamtenergie des Teilchens durch
\[ \begin{align} E \coloneqq E_{\text{kin}} + U, \end{align} \]
so ist diese Größe erhalten:
\[ \begin{align} \frac{dE}{dt} &= \frac{dE_{\text{kin}}}{dt} + \frac{dU}{dt} = \frac{1}{2}m2\frac{d\mathbf{r}}{dt}\cdot\frac{d^2\mathbf{r}}{dt^2} + \nabla U\cdot\frac{d\mathbf{r}}{dt}\nonumber\\ &= \left(m\frac{d^2\mathbf{r}}{dt^2} + \nabla U\right)\cdot\frac{d\mathbf{r}}{dt} = \left(\mathbf{F} + \nabla U\right)\cdot\frac{d\mathbf{r}}{dt} = \left(-\nabla U + \nabla U\right)\cdot\frac{d\mathbf{r}}{dt} = 0 \end{align} \]
\[ \begin{align} \Rightarrow \frac{dE}{dt} = 0 \end{align} \]
Die Energie eines Teilchens, welches sich unter der Wirkung einer konservativen Kraft bewegt, ist also konstant.
Es existieren zwei weitere Formulierungen der klassischen Mechanik, der Lagrange-Formalismus sowie der Hamilton-Formalismus. Beide lassen sich aus den Newton'schen Axiomen herleiten.
2.2 Lagrange-Formalismus
Die Newton'sche Mechanik ist praktisch bei umherfliegenden Massenpunkten (Atome in einem Gas, Planeten in einem Sonnensystem) oder starren Körpern (Schiffe, Flugzeuge). Diese können sich prinzipiell frei in jede Richtung bewegen. Häufig sind jedoch solche Situationen, in denen ein Massenpunkt in seiner Bewegungsfreiheit eingeschränkt ist, beispielsweise eine Murmel in einer Murmelbahn, eine Billardkugel auf einem Tisch oder ein Zug in einem Gleis. Solche Systeme unterliegen Zwangsbedingungen. Besteht das System aus genau einem Teilchen mit der Trajektorie $\mathbf{r} = \mathbf{r}\left(t\right)$, so kann man eine Zwangsbedingung in der Form
\[ \begin{align} g\left(\mathbf{r}, t\right) = 0\tag{2.38}\label{eq:def_holonome_zwangsbedingung} \end{align} \]
schreiben. $g$ ist dabei irgendein Skalarfeld. Die Bedingung $g = 0$ kann man sich als eine Fläche vorstellen. Diese Fläche kann auch explizit zeitabhängig sein wie zum Beispiel ein vertikal beschleunigter Billardtisch. Glg. (2.38) bezeichnet man als holonome Zwangsbedingung, alle anderen Zwangsbedingungen heißen nichtholonom. Dies wäre zum Beispiel der Fall, wenn $g$ eine Funktion von $\frac{d\mathbf{r}}{dt}$ wäre. Explizit zeitabhängige Zwangsbedingungen heißen rheonom, während zeitunabhängige Zwangsbedingungen skleronom genannt werden. Allgemein hat man $N$ Teilchen, in diesem Fall kann man $R$ Zwangsbedingungen aufstellen
\[ \begin{align} g_\alpha\left(\mathbf{r}_1, \dotsc, \mathbf{r}_N, t\right) = 0 \end{align} \]
mit $1\leq\alpha\leq R$ und $R\leq 3N - 1$. Bei $R = 3N$ könnte keine Bewegung mehr stattfinden, da jede Zwangsbedingung einen Freiheitsgrad eliminiert.
2.2.1 Lagrange-Gleichungen 1. Art
Die Einhaltung der Zwangsbedingungen wird durch die sogenannten Zwangskräfte sichergestellt. Diese sind senkrecht auf der durch die Zwangsbedingung vorgegebenen Fläche - dies kann man sich beispielsweise bei einer Bewegung auf einem Tisch leicht klarmachen. Die Reibungskraft wirkt zwar tangential zum Tisch, jedoch hat die Reibungskraft nichts mit der Einhaltung der Zwangsbedingung zu tun und ist daher auch keine Zwangskraft. Für eine Zwangskraft $\mathbf{Z}$ kann man also ansetzen
\[ \begin{align} \mathbf{Z}\left(\mathbf{r}, t\right) = \lambda\left(t\right)\nabla g\left(\mathbf{r}, t\right). \end{align} \]
Der Multiplikator $\lambda$ ist zeitabhängig, da die Zwangskraft von der zeitabhängigen Trajektorie abhängt. Man kann nun als Bewegungsgleichung notieren
\[ \begin{align} m\frac{d^2}{dt^2}\mathbf{r} = \mathbf{F} + \lambda\left(t\right)\nabla g\left(\mathbf{r}, t\right), \end{align} \]
hierbei ist $\mathbf{F}$ die Summe aller Nicht-Zwangskräfte (Schwerkraft, Reibungskraft etc.). Hat man zwei Zwangsbedingungen gegeben, kann man dies verallgemeinern zu
\[ \begin{align} m\frac{d^2}{dt^2}\mathbf{r} = \mathbf{F} + \sum_{\alpha = 1}^{2}\lambda_\alpha\left(t\right)\nabla g_\alpha\left(\mathbf{r}, t\right). \end{align} \]
Dies ist plausibel: $g_1 = 0$ und $g_2 = 0$ definieren zwei Flächen, in denen die Trajektorie verläuft. $\nabla g_1$ und $\nabla g_2$ stehen jeweils senkrecht auf der entsprechenden Fläche und somit auch auf der Trajektorie, außerdem sind sie linear unabhängig. Daher ist $\sum_{\alpha = 1}^{2}\lambda_\alpha\left(t\right)\nabla g_\alpha\left(\mathbf{r}, t\right)$ ein allgemeiner Ansatz für eine Kraft senkrecht zur Trajektorie, also für eine allgemeine Zwangskraft. Man hat nun zusammen mit $g_1\left(\mathbf{r}, t\right) = g_2\left(\mathbf{r}, t\right) = 0$ fünf Gleichungen für die fünf unbekannten Funktionen $x\left(t\right), y\left(t\right), z\left(t\right), \lambda_1\left(t\right), \lambda_2\left(t\right)$. Es besteht also die Chance auf Lösbarkeit. Im Allgemeinen hat man $N$ Teilchen mit den kartesischen Koordinaten $x_n$ mit $1\leq n\leq 3N$ gegeben, hierbei sind $x_1, x_2, x_3$ die Koordinaten des ersten Teilchens $x_4, x_5, x_6$ diejenigen des zweiten usw. Hat man $R\leq 3N - 1$ holonome Zwangsbedingungen $g_j\left(\mathbf{r}, t\right) = 0$ gegeben, kann man als Bewegungsgleichungen notieren
Hierbei ist $m_1 = m_2 = m_3$ die Masse des ersten Teilchens usw. Zusammen mit den Zwangsbedingungen erhält man $3N + R$ Gleichungen an die $3N + R$ zu bestimmenden Funktionen $x_n\left(t\right), \lambda_\alpha\left(t\right)$. Diese $3N + R$ Gleichungen bezeichnet man als Lagrange-Gleichungen 1. Art.
2.2.2 Lagrange-Gleichungen 2. Art
Ist man an der Berechnung der Zwangskräfte nicht interessiert, bietet sich deren Eliminierung an. Dies wird nun durchgeführt.
Wie bereits angemerkt, eliminiert jede der Zwangsbedingungen $g_\alpha$ einen Freiheitsgrad. Die Anzahl der Freiheitsgrade
\[ \begin{align} f = 3N - R \end{align} \]
ist hier die Anzahl der Zahlen, die notwendig ist, um den Ort aller $N$ Teilchen festzulegen. Diese Zahlen bezeichnet man als generalisierte Koordinaten $q_1, \dotsc, q_f$. Sie müssen zwei Bedingungen erfüllen:
Sie müssen die kartesischen Koordinaten festlegen, $x_n = x_n\left(q_1, \dotsc, q_f, t\right)$ für alle $1\leq n\leq 3N$.
Sie müssen die Zwangsbedingungen berücksichtigen: $g_\alpha\left(q_1, \dotsc, q_f, t\right) = 0$ für $1\leq\alpha\leq R$ und alle möglichen $q_i$.
Die zweite Bedingung lässt sich formal ausdrücken durch
\[ \begin{align} \frac{dg_\alpha}{dq_k} = \sum_{n = 1}^{3N}\frac{\partial g_\alpha}{\partial x_n}\frac{\partial x_n}{\partial q_k} = 0. \end{align} \]
Multipliziert man Glg. (2.43) mit $\frac{\partial x_n}{\partial q_k}$, erhält man
\[ \begin{align} m_n\frac{d^2x_n}{dt^2}\frac{\partial x_n}{\partial q_k} = F_n\frac{\partial x_n}{\partial q_k} + \sum_{\alpha = 1}^{R}\lambda_\alpha\left(t\right)\frac{\partial g_\alpha\left(x_1, \dotsc, x_{3N}, t\right)}{\partial x_n}\frac{\partial x_n}{\partial q_k}. \end{align} \]
Summiert man dies über $n$, folgt
\[ \begin{align} \sum_{n = 1}^{3N}m_n\frac{d^2x_n}{dt^2}\frac{\partial x_n}{\partial q_k} = \sum_{n = 1}^{3N}F_n\frac{\partial x_n}{\partial q_k}.\tag{2.47}\label{eq:lagrange_deriv_3} \end{align} \]
Diese Gleichung gilt für alle $1\leq k\leq f$. Zwangskräfte treten hier nicht mehr auf. Man führt die folgenden Schreibweisen ein:
\[ \begin{align} x \coloneqq \left(x_1, \dotsc, x_n\right), & {} & \newdot{x} \coloneqq \left(\newdot{x}_1, \dotsc, \newdot{x}_n\right)\\ q \coloneqq \left(q_1, \dotsc, q_n\right), & {} & \newdot{q} \coloneqq \left(\newdot{q}_1, \dotsc, \newdot{q}_n\right) \end{align} \]
Die $\newdot{q}_i$ bezeichnet man auch als generalisierte Geschwindigkeiten. Man leitet nun die Transformationsgleichung
\[ \begin{align} x_n = x_n\left(q, t\right) \end{align} \]
total nach der Zeit ab:
\[ \begin{align} \newdot{x}_n = \frac{d}{dt}x_n\left(q, t\right) = \sum_{k = 1}^{f}\frac{\partial x_n}{\partial q_k}\newdot{q}_k + \frac{\partial x_n}{\partial t} = \newdot{x}_n\left(q, \newdot{q}, t\right)\tag{2.51}\label{eq:transformation_lagrange_geschwindigkeiten} \end{align} \]
Es folgt
\[ \begin{align} \frac{\partial\newdot{x}_n}{\partial\newdot{q}_k} = \frac{\partial x_n}{\partial q_k}. \end{align} \]
Für die kinetische Energie $T$ gilt
\[ \begin{align} T = T\left(\newdot{x}\right) = \sum_{n = 1}^{3N}\frac{1}{2}m_n\newdot{x}_n^2.\tag{2.53}\label{eq:newton_kinetische_energie} \end{align} \]
Hier setzt man Glg. (2.51) ein:
\[ \begin{align} T = T\left(q, \newdot{q}, t\right) = \sum_{i, k = 1}^{f}m_{i, k}\left(q, t\right)\newdot{q}_i\newdot{q}_k + \sum_{k = 1}^{f}b_k\left(q, t\right)\newdot{q}_k + c\left(q, t\right) \end{align} \]
Aus Glg. (2.53) folgt
\[ \begin{align} \frac{\partial T\left(q, \newdot{q}, t\right)}{\partial q_k} = \sum_{n = 1}^{3N}m_n\newdot{x}_n\frac{\partial\newdot{x}_n}{\partial q_k}.\tag{2.55}\label{eq:lagrange_deriv_2} \end{align} \]
Weiterhin gilt
\[ \begin{align} \frac{\partial T\left(q, \newdot{q}, t\right)}{\partial\newdot{q}_k} = \sum_{n = 1}^{3N}m_n\newdot{x}_n\frac{\partial\newdot{x}_n}{\partial\newdot{q}_k} = \sum_{n = 1}^{3N}m_n\newdot{x}_n\frac{\partial x_n}{\partial q_k}. \end{align} \]
Leitet man dies total nach der Zeit ab, erhält man
\[ \begin{align} \frac{d}{dt}\frac{\partial T}{\partial\newdot{q}_k} = \sum_{n = 1}^{3N}m_n\frac{d^2x_n}{dt^2}\frac{\partial x_n}{\partial q_k} + \sum_{n = 1}^{3N}m_n\newdot{x}_n\frac{\partial\newdot{x}_n}{\partial q_k}.\tag{2.57}\label{eq:lagrange_deriv_1} \end{align} \]
Im letzten Term wurde die folgende Identität ausgenutzt:
\[ \begin{align} \frac{d}{dt}\frac{\partial x_n}{\partial q_k} = \sum_{l = 1}^{f}\frac{\partial^2x_n}{\partial q_l\partial q_k}\newdot{q}_l + \frac{\partial^2 x_n}{\partial t\partial q_k} = \frac{\partial}{\partial q_k}\left(\sum_{l = 1}^{f}\frac{\partial x_n}{\partial q_l}\newdot{ q_l} + \frac{\partial x_n}{\partial t}\right) = \frac{\partial}{\partial q_k}\frac{dx_n}{dt} \end{align} \]
Man definiert nun verallgemeinerte Kräfte:
\[ \begin{align} Q_k \coloneqq \sum_{n = 1}^{3N}F_n\frac{\partial x_n}{\partial q_k} \end{align} \]
Diese Definition setzt man zusammen mit Glg. (2.57) und Glg. (2.55) in Glg. (2.47) ein:
\[ \begin{align} \sum_{n = 1}^{3N}m_n\frac{d^2x_n}{dt^2}\frac{\partial x_n}{\partial q_k} = \sum_{n = 1}^{3N}F_n\frac{\partial x_n}{\partial q_k} & {} & \Leftrightarrow \sum_{n = 1}^{3N}m_n\frac{d^2x_n}{dt^2}\frac{\partial x_n}{\partial q_k} = Q_k\nonumber\\ \Leftrightarrow\frac{d}{dt}\frac{\partial T}{\partial\newdot{q}_k} - \sum_{n = 1}^{3N}m_n\newdot{x}_n\frac{\partial\newdot{x}_n}{\partial q_k} = Q_k & {} & \Leftrightarrow \frac{d}{dt}\frac{\partial T}{\partial\newdot{q}_k} - \frac{\partial T}{\partial q_k} = Q_k \end{align} \]
Man setzt für die Kräfte
\[ \begin{align} F_n = -\frac{\partial U\left(x, \newdot{x}, t\right)}{\partial x_n} + \frac{d}{dt}\frac{\partial U\left(x, \newdot{x}, t\right)}{\partial\newdot{x}_n}\tag{2.61}\label{eq:lagrange_kraefte} \end{align} \]
mit einem Potential $U = U\left(x, \newdot{x}, t\right)$ an. Im Falle einer geschwindigkeitsunabhängigen konservativen Kraft reduziert sich dies auf die aus der Newton'schen Mechanik bekannte Form, der zweite Term wurde hinzugefügt, um die Geschwindigkeitsabhängigkeit zu berücksichtigen. $\left(x, \newdot{x}\right)$ kann man bijektiv auf $\left(q, \newdot{q}\right)$ abbilden, daher kann man notieren
\[ \begin{align} U = U\left(q, \newdot{q}, t\right). \end{align} \]
Jetzt kann man schreiben
\[ \begin{align} Q_k = \sum_{n = 1}^{3N}F_n\frac{\partial x_n}{\partial q_k} = -\sum_{n = 1}^{3N}\frac{\partial U}{\partial x_n}\frac{\partial x_n}{\partial q_k} + \frac{d}{dt}\sum_{n = 1}^{3N}\frac{\partial U}{\partial\newdot{x}_n}\frac{\partial x_n}{\partial q_k} = -\frac{\partial U}{\partial q_k} + \frac{d}{dt}\frac{\partial U}{\partial\newdot{q}_k}. \end{align} \]
Damit folgt die Gleichung
\[ \begin{align} \frac{d}{dt}\frac{\partial\left(T - U\right)}{\partial\newdot{q}_k} = \frac{\partial\left(T - U\right)}{\partial q_k}. \end{align} \]
Man definiert die Lagrange-Funktion $L$ durch
\[ \begin{align} L\left(q, \newdot{q}, t\right) \coloneqq T\left(q, \newdot{q}, t\right) - U\left(q, \newdot{q}, t\right). \end{align} \]
Damit erhält man
\[ \begin{align} \frac{d}{dt}\frac{\partial L\left(q, \newdot{q}, t\right)}{\partial\newdot{q}_k} = \frac{\partial L\left(q, \newdot{q}, t\right)}{\partial q_k}. \end{align} \]
Dies sind für $1\leq k\leq f$ die Lagrange-Gleichungen 2. Art.
2.3 Hamilton-Formalismus
Man definiert zunächst die kanonischen Impulse durch
\[ \begin{align} p_i \coloneqq\frac{\partial L}{\partial\newdot{q}_i} \end{align} \]
für $1\leq i\leq f$. Man eliminiert nun die generalisierten Geschwindigkeiten $\newdot{q}$:
\[ \begin{align} p_i = \frac{\partial L\left(q, \newdot{q}, t\right)}{\partial\newdot{q}_i}\to\newdot{q}_j = \newdot{q}_j\left(q, p, t\right) \end{align} \]
Die Hamilton-Funktion $H$ wird definiert durch
\[ \begin{align} H\left(q, p, t\right) \coloneqq \sum_{i = 1}^{f}\newdot{q}_i\left(q, p, t\right)p_i - L\left(q, \newdot{q}\left(q, p, t\right), t\right). \end{align} \]
Die Hamilton'schen Gleichungen oder auch kanonische Gleichungen folgen durch partielles Differenzieren:
\[ \begin{align} \frac{\partial H}{\partial q_k} &= \sum_{i = 1}^{f}\frac{\partial\newdot{q}_i}{\partial q_k}p_i - \frac{\partial L}{\partial q_k} - \sum_{i = 1}^{f}\frac{\partial L}{\partial\newdot{q}_i}\frac{\partial\newdot{q}_i}{\partial q_k} = -\frac{\partial L}{\partial q_k} = -\frac{d}{dt}\left(\frac{\partial L}{\partial\newdot{q}_k}\right) = -\newdot{p}_k\tag{2.70}\label{eq:hamilton_0}\\ \frac{\partial H}{\partial p_k} &= \sum_{i = 1}^{f}\frac{\partial\newdot{q}_i}{\partial p_k}p_i + \newdot{q}_k - \sum_{i = 1}^{f}\frac{\partial L}{\partial\newdot{q}_i}\frac{\partial\newdot{q}_i}{\partial p_k} = \newdot{q}_k\tag{2.71}\label{eq:hamilton_1}\\ \frac{\partial H}{\partial t} &= \sum_{i = 1}^{f}\frac{\partial\newdot{q}_i}{\partial t}p_i - \sum_{i = 1}^{f}\frac{\partial L}{\partial\newdot{q}_i}\frac{\partial\newdot{q}_i}{\partial t} - \frac{\partial L}{\partial t} = -\frac{\partial L}{\partial t}\tag{2.72}\label{eq:hamilton_2} \end{align} \]
Den Raum der $\left(q, p\right)$ nennt man Phasenraum.
2.3.1 Poisson-Klammer
Zwei beliebige Größen $F$, $K$ können nur von $\left(q, p, t\right)$ abhängen. Man definiert die Poisson-Klammer $\left\lbrace F, K\right\rbrace$ von $F$ und $K$ durch
\[ \begin{align} \left\lbrace F, K\right\rbrace \coloneqq \sum_{i = 1}^f\left(\frac{\partial F}{\partial q_i}\frac{\partial K}{\partial p_i} - \frac{\partial F}{\partial p_i}\frac{\partial K}{\partial q_i}\right).\tag{2.73}\label{eq:poisson_bracket_def} \end{align} \]
Hieraus folgen unmittelbar
\[ \begin{align} \left\lbrace F + G, K\right\rbrace &= \left\lbrace F, K\right\rbrace + \left\lbrace G, K\right\rbrace,\tag{2.74}\label{eq:poisson_bracket_prop_1}\\ \left\lbrace F, K\right\rbrace &= -\left\lbrace K, F\right\rbrace,\tag{2.75}\label{eq:poisson_bracket_prop_2}\\ \left\lbrace F, F\right\rbrace &= 0.\tag{2.76}\label{eq:poisson_bracket_prop_3} \end{align} \]
Im Hamilton-Formalismus gelten
\[ \begin{align} \frac{\partial q_i}{\partial q_j} = \delta_{i, j}, & {} & \frac{\partial q_i}{\partial p_j} = 0, & {} & \frac{\partial q_i}{\partial t} = 0,\\ \frac{\partial p_i}{\partial q_j} = 0, & {} & \frac{\partial p_i}{\partial p_j} = \delta_{i, j}, & {} & \frac{\partial p_i}{\partial t} = 0. \end{align} \]
Weiterhin sind
\[ \begin{align} \left\lbrace F, q_j\right\rbrace = -\frac{\partial F}{\partial p_j}, & {} & \left\lbrace F, p_j\right\rbrace = \frac{\partial F}{\partial q_j}. \end{align} \]
Hieraus folgen weiter
\[ \begin{align} \left\lbrace q_i, q_j\right\rbrace = 0, & {} & \left\lbrace p_i, p_j\right\rbrace = 0, & {} & \left\lbrace p_i, q_j\right\rbrace = -\delta_{i, j}. \end{align} \]
Für die totale Zeitableitung von $F$ erhält man nun
\[ \begin{align} \frac{dF}{dt} = \sum_{i = 1}^f\frac{\partial F}{\partial q_i}\newdot{q}_i + \sum_{i = 1}^f\frac{\partial F}{\partial p_i}\newdot{p}_i + \frac{\partial F}{\partial t} = \sum_{i = 1}^f\frac{\partial F}{\partial q_i}\frac{\partial H}{\partial p_i} - \sum_{i = 1}^f\frac{\partial F}{\partial p_i}\frac{\partial H}{\partial q_i} + \frac{\partial F}{\partial t} \end{align} \]
Dies impliziert
\[ \begin{align} \frac{dH}{dt} = \frac{\partial H}{\partial t}. \end{align} \]
Die Hamilton-Funktion ist also genau dann konstant, wenn sie nicht explizit von der Zeit abhängt. Aus Glg. (2.82) folgen die Glg.en (2.70) - (2.71) in der Form
\[ \begin{align} \newdot{p}_i = \left\lbrace p_i, H\right\rbrace, & {} & \newdot{q}_i = \left\lbrace q_i, H\right\rbrace. \end{align} \]
2.4 Harmonischer Oszillator
Als Beispiel für die Anwendung der Theorie der klassischen Mechanik wird der sogenannte harmonische Oszillator verwendet. Dabei geht es um die Evolution einer generalisierten Koordinate $x = x\left(t\right)$ entsprechend der Differenzialgleichung
\[ \begin{align} \frac{d^2x}{dt^2} = -kx.\tag{2.85}\label{eq:harm_osz_base} \end{align} \]
Ist $x$ die kartesische Koordinate eines Massenpunktes mit der Masse $m$ und $k$ der Quotient aus Federkonstante und Masse, so handelt es sich um eine ungedämpfte Feder, es gibt jedoch auch andere Beispiele.
2.4.1 Ungedämpfter Fall
Setzt man in Glg. (2.85) eine Lösung $x = x_0e^{-i\omega_0t}$ ein, folgt
$\omega$ bezeichnet man als Eigenfrequenz.
Für die kinetische Energie $K$ als Funktion der Zeit gilt
\[ \begin{align} K = \frac{1}{2}m\left(\frac{dx}{dt}\right)^2 = \frac{1}{2}mx_0^2\omega_0^2\sin\left(\omega_0t\right)^2, \end{align} \]
hierbei ist $m$ die Masse des schwingenden Massenpunktes. Für die potentielle Energie gilt
\[ \begin{align} U = \frac{1}{2}mkx^2 = \frac{1}{2}mkx_0^2\cos\left(\omega_0t\right)^2. \end{align} \]
Für die Gesamtenergie $E$ gilt somit
\[ \begin{align} E &= K + U = \frac{1}{2}mx_0^2\omega_0^2\sin\left(\omega_0t\right)^2 + \frac{1}{2}mkx_0^2\cos\left(\omega_0t\right)^2\nonumber\\ &= \frac{1}{2}mkx_0^2\left[\sin\left(\omega_0t\right)^2 + \cos\left(\omega_0t\right)^2\right] = \frac{1}{2}mkx_0^2 = \frac{1}{2}m\omega_0^2x_0^2.\tag{2.89}\label{eq:e_tot_harm_osc} \end{align} \]
Weiterhin ist im Mittel die Hälfte der Energie in kinetischer und potentieller Energie gespeichert:
\[ \begin{align} \newoverline{K} &= \frac{1}{4}mx_0^2\omega_0^2 =\frac{1}{4}mx_0^2k = \frac{E}{2},\nonumber\\ \newoverline{U} &= \frac{1}{4}mkx_0^2 = \frac{1}{4}m\omega_0^2x_0^2 = \frac{E}{2}. \end{align} \]
2.4.2 Gedämpfter Fall
Nun dämpft man den Oszillator linear, modifiziert Glg. (2.85) also entsprechend
\[ \begin{align} x'' = -kx - 2dx'\tag{2.91}\label{eq:harm_osz_dampened} \end{align} \]
mit einer Dämpfung $d \geq 0$. Setzt man hier wieder eine Lösung der Form $x = x_0e^{-i\omega t}$ ein, erhält man
\[ \begin{align} -\omega^2 = -k + 2id\omega \Leftrightarrow \omega^2 + 2id\omega - k = 0. \end{align} \]
Hieraus folgt mittels der pq-Formel Glg. (A.5)
\[ \begin{align} \omega = -id \pm \sqrt{-d^2 + k}. \end{align} \]
Im Fall $d = 0$ ergibt sich wieder Glg. (2.86).
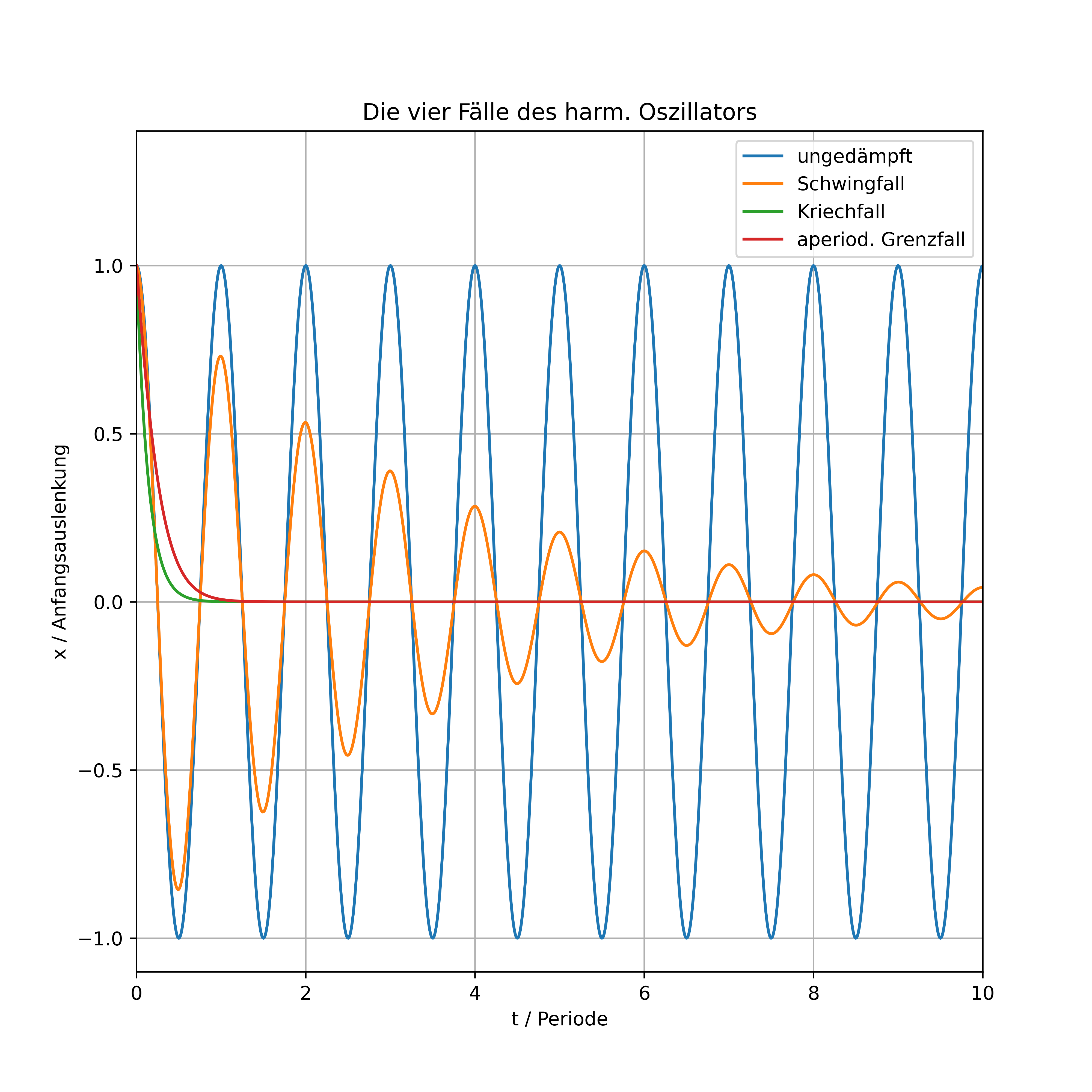
2.4.2.1 Schwingfall
Im Fall
\[ \begin{align} -d^2 + k > 0 \Leftrightarrow d^2 < k \end{align} \]
gilt
\[ \begin{align} x\left(t\right) = \underbrace{x_0}_{\text{Anfangsamplitude}}\cdot\underbrace{\exp\left(-dt\right)}_{\text{Einhüllende}}\cdot\underbrace{\exp\left(\mp it\sqrt{-d^2 + k}\right)}_{\text{Oszillation}} \end{align} \]
bzw.
\[ \begin{align} x\left(t\right) = x_0\exp\left(-dt\right)\exp\left(-it\sqrt{-d^2 + k}\right) + x_1\exp\left(-dt\right)\exp\left(it\sqrt{-d^2 + k}\right). \end{align} \]
$x_0$ und $x_1$ ergeben such aus den Anfangsbedingungen. Die Dämpfung hat in diesem Fall also zwei Konsequenzen:
Die Eigenfrequenz lautet nun
Die Anfangsamplitude nimmt mit der Zerfallszeit $\tau = \frac{1}{d}$ exponentiell mit der Zeit ab.
Diesen Fall bezeichnet man als Schwingfall.
2.4.2.2 Kriechfall
Im Fall
\[ \begin{align} -d^2 + k < 0 \Leftrightarrow d^2 > k \end{align} \]
gilt
\[ \begin{align} \omega = -id \pm \sqrt{-d^2 + k} = -id \pm \sqrt{\left(-1\right)\cdot\left(d^2 - k\right)} = -id \pm \sqrt{-1}\sqrt{\underbrace{d^2 - k}_{> 0}} = -id \pm i\sqrt{d^2 - k} = i\left(\underbrace{-d \pm \sqrt{d^2 - k}}_{< 0}\right). \end{align} \]
Hieraus folgt
\[ \begin{align} x\left(t\right) = x_0\exp\left[-i^2\left(-d \pm \sqrt{d^2 - k}\right)t\right] = x_0\exp\left[\left(-d \pm \sqrt{d^2 - k}\right)t\right]. \end{align} \]
bzw.
\[ \begin{align} x\left(t\right) = x_0\exp\left[\left(-d + \sqrt{d^2 - k}\right)t\right] + x_1\exp\left[\left(-d - \sqrt{d^2 - k}\right)t\right]. \end{align} \]
Es findet also keine Oszillation mehr statt. Diesen Fall bezeichnet man als Kriechfall.
2.4.2.3 Aperiodischer Grenzfall
Im Grenzfall
\[ \begin{align} -d^2 + k = 0 \Leftrightarrow d^2 = k\tag{2.102}\label{eq:cond_ap} \end{align} \]
schrumpfen die zwei linear unabhängigen Lösungen, welche im Schwingfall und im aperiodischen Grenzfall gefunden wurden, auf eine zusammen. Da eine Differenzialgleichung zweiter Ordnung zugrunde liegt muss es in diesem Fall noch eine weitere Lösung geben. Hierzu macht man den Ansatz
\[ \begin{align} x\left(t\right) = x_1t\exp\left(-dt\right).\tag{2.103}\label{eq:harm_osz_ap_ansatz} \end{align} \]
Dies impliziert
\[ \begin{align} x'\left(t\right) &= x_1\exp\left(-dt\right) - dx_1t\exp\left(-dt\right),\\ x''\left(t\right) &= -dx_1\exp\left(-dt\right) - dx_1\exp\left(-dt\right) + d^2x_1t\exp\left(-dt\right) = -2dx_1\exp\left(-dt\right) + d^2x_1t\exp\left(-dt\right). \end{align} \]
Hieraus folgt durch Einsetzen in Glg. (2.91)
\[ \begin{align} -2dx_1\exp\left(-dt\right) + d^2x_1t\exp\left(-dt\right) &= -kx_1t\exp\left(-dt\right) - x_12d\exp\left(-dt\right) + 2d^2x_1t\exp\left(-dt\right)\nonumber\\ \Leftrightarrow-2dx_1 + d^2x_1t &= -kx_1t - 2x_1d + 2d^2x_1t\nonumber\\ \Leftrightarrow-2d + d^2t &= -kt - 2d + 2d^2t\nonumber\\ \Leftrightarrow d^2t &= -kt + 2d^2t\nonumber\\ \Leftrightarrow d^2 &= -k + 2d^2\nonumber\\ \Leftrightarrow-d^2 &= -k\nonumber. \end{align} \]
Dies ist laut Glg. (2.102) erfüllt. Glg. (2.103) löst also Glg (2.91). Die allgemeine Lösung lautet in diesem Fall also
\[ \begin{align} x\left(t\right) = x_0\exp\left(-dt\right) + x_1t\exp\left(-dt\right) = \left(x_0 + x_1t\right)\exp\left(-dt\right). \end{align} \]
Diesen Fall bezeichnet man als aperiodischen Grenzfall. Die vier Fälle des harmonischen Oszillators werden in Abb. 2.1 dargestellt.
2.4.3 Angetriebener Fall
Nun treibt man das System mit der Kreisrequenz $\omega$ an, modifiziert Glg. (2.91) also zu
\[ \begin{align} x'' + kx + 2dx' = y_0\exp\left(-i\omega t\right) \end{align} \]
mit einer reellen Anregungsamplitude $y_0 > 0$. Setzt man hier wiederum den Ansatz $x = x_0e^{-i\omega t}$ ein, erhält man
\[ \begin{align} -\omega^2x_0 + kx_0 - 2id\omega x_0 &= y_0\nonumber\\ \Leftrightarrow -\omega^2 + k - 2id\omega &= \frac{y_0}{x_0}\\ \Leftrightarrow \omega^2 - k + 2id\omega &= -\frac{y_0}{x_0}\\ \Leftrightarrow \omega^2 + 2id\omega + \left(\frac{y_0}{x_0} - k\right) &= 0.\tag{2.110}\label{eq_harm_osz_force_deriv_0} \end{align} \]
Die Amplitude ist zeitunabhängig, daher ist $\omega$ reell. Für $x_0$ notiert man nun in Polarkkordinaten
\[ \begin{align} x_0 = \left|x_0\right|\exp\left(i\phi\right), \end{align} \]
die reelle Zahl $\phi$ wird als Phase bezeichnet. Ist sie positiv, läuft der Oszillator der Anregung voraus, ist sie negativ, läuft der Oszillator der Anregung hinterher. Setzt man dies in Glg. (2.110) ein, erhält man
\[ \begin{align} \omega^2 + 2id\omega + \left(\frac{y_0}{\left|x_0\right|}e^{-i\phi} - k\right) &= \omega^2 + 2id\omega + \left(\frac{y_0}{\left|x_0\right|}\cos\left(\phi\right) - \frac{y_0}{\left|x_0\right|}i\sin\left(\phi\right) - k\right) = 0.\tag{2.112}\label{eq_harm_osz_force_deriv_1} \end{align} \]
$\omega$ ist hierbei keine Unbekannte, sie ist durch die Anregung gegeben. Die Unbekannten sind die Reaktion des Systems $\left|x_0\right|, \phi$. Um diese zu bestimmen notiert man Real- und Imaginärteil von Glg. (2.112):
\[ \begin{align} \omega^2 + \left(\frac{y_0}{\left|x_0\right|}\cos\left(\phi\right) - k\right) &= 0,\tag{2.113}\label{eq_harm_osz_force_deriv_2}\\ 2d\omega - \frac{y_0}{\left|x_0\right|}\sin\left(\phi\right) &= 0 \Rightarrow 2d\omega = \frac{y_0}{\left|x_0\right|}\sin\left(\phi\right) \Rightarrow \left|x_0\right| = \frac{y_0}{2d\omega}\sin\left(\phi\right).\tag{2.114}\label{eq_harm_osz_force_deriv_3} \end{align} \]
Setzt man Glg. (2.114) in Glg. (2.113) ein, erhält man
\[ \begin{align} \omega^2 + \left(\frac{y_0}{\frac{y_0}{2d\omega}\sin\left(\phi\right)}\cos\left(\phi\right) - k\right) &= 0\nonumber\\ \Leftrightarrow\omega^2 + \left(\frac{2d\omega}{\tan\left(\phi\right)} - k\right) &= 0\nonumber\\ \Leftrightarrow\omega^2\tan\left(\phi\right) + 2d\omega - k\tan\left(\phi\right) &= 0\nonumber\\ \Leftrightarrow\tan\left(\phi\right)\left(k - \omega^2\right) &= 2d\omega\nonumber\\ \Leftrightarrow\tan\left(\phi\right) &= \frac{2d\omega}{k - \omega^2}. \end{align} \]
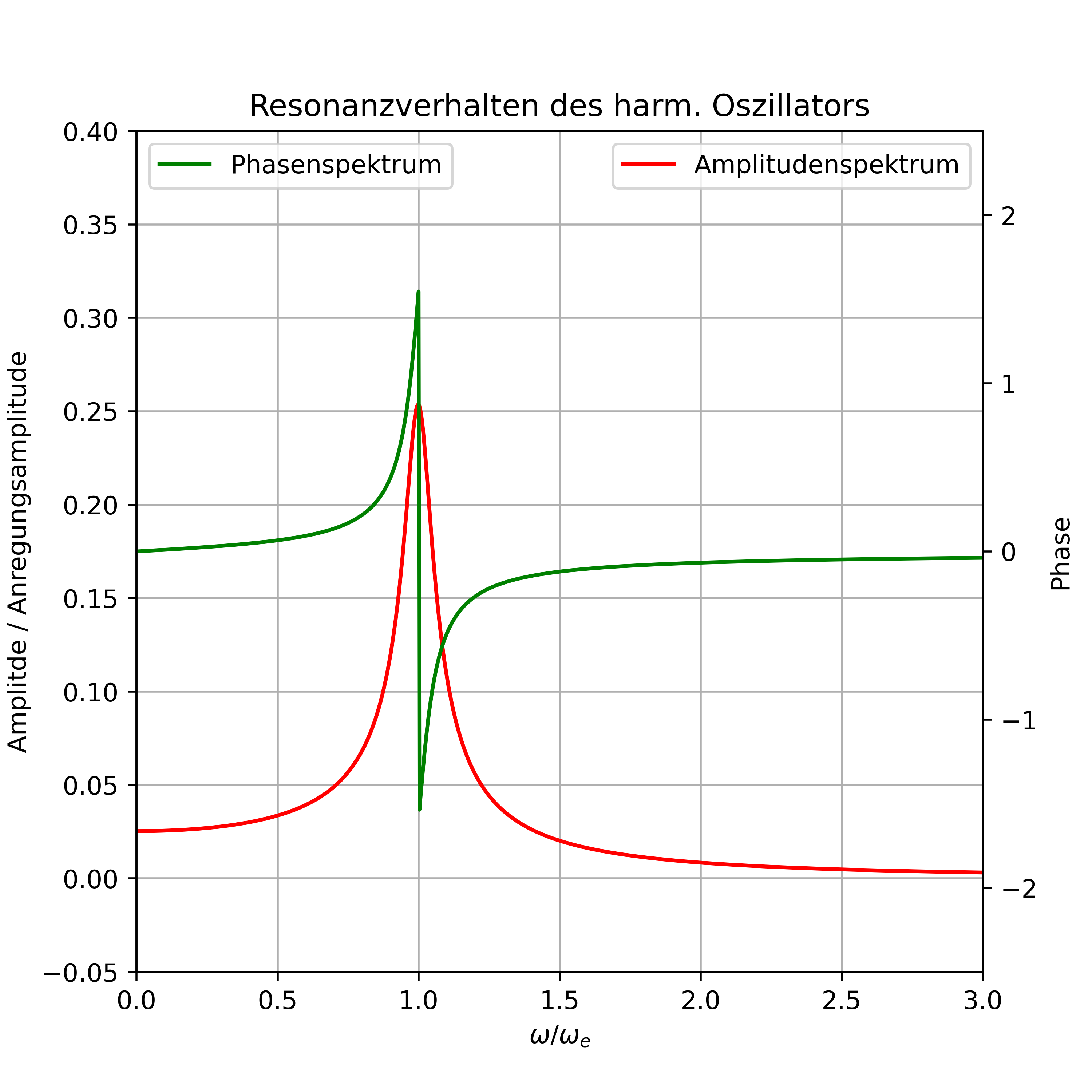
Die Funktion
bezeichnet man als Phasenspektrum. Wegen $-\pi/2 < \phi < \pi/2$ gilt
\[ \begin{align} \sin = \tan\cdot\cos = \tan\sqrt{1 - \sin^2} \Rightarrow \sin^2 = \tan^2 - \tan^2\sin^2 \Rightarrow \sin^2\left(1 + \tan^2\right) = \tan^2 \Rightarrow \sin = \frac{\tan}{\sqrt{1 + \tan^2}}. \end{align} \]
Setzt man nun Glg. (2.116) in Glg. (2.114) ein, erhält man
\[ \begin{align} \left|x_0\right| = \frac{y_0}{2d\omega}\sin\left(\phi\right) = \frac{y_0}{2d\omega}\frac{\tan\left(\phi\right)}{\sqrt{1 + \tan\left(\phi\right)^2}} = \frac{y_0}{2d\omega}\frac{\frac{2d\omega}{k - \omega^2}}{\sqrt{1 + \frac{4d^2\omega^2}{\left(k - \omega^2\right)^2}}} = \frac{y_0}{\left(k - \omega^2\right)\sqrt{1 + \frac{4d^2\omega^2}{\left(k - \omega^2\right)^2}}}. \end{align} \]
Hieraus folgt
\[ \begin{align} \left|x_0\right| = \frac{y_0}{\sqrt{\left(k - \omega^2\right)^2 + 4d^2\omega^2}}. \end{align} \]
Diese Funktion bezeichnet man als Amplitudenspektrum. Man definiert die Hilfsfunktion $h$ durch
\[ \begin{align} h\left(\omega\right) \coloneqq \left(k - \omega^2\right)^2 + 4d^2\omega^2 \Rightarrow h'\left(\omega\right) = -4\omega\left(k - \omega^2\right) + 8d^2\omega = -4\omega k + 4\omega^3 + 8d^2\omega. \end{align} \]
Nullsetzen der Ableitung ergibt
\[ \begin{align} -4\omega k + 4\omega^3 + 8d^2\omega &\hastobe 0 \Rightarrow -4k + 4\omega^2 + 8d^2 = 0 \Rightarrow -k + \omega^2 + 2d^2 = 0\nonumber\\ \Rightarrow \omega^2 &= k - 2d^2. \end{align} \]
Man beschränkt sich hier auf den Fall
\[ \begin{align} k - 2d^2 > 0 \Leftrightarrow d < \sqrt{\frac{k}{2}}. \end{align} \]
Die Frequenz
bezeichnet man als Resonanzfrequenz. Für die zweite Ableitung von $h$ erhält man
\[ \begin{align} h''\left(\omega\right) = -4k + 12\omega^2 + 8d^2. \end{align} \]
Hieraus folgt
\[ \begin{align} h''\left(\omega_\text{res}\right) = -4k + 12\left(k - 2d^2\right) + 8d^2 = -4k + 12k - 24d^2 + 8d^2 = 8k - 16d^2 = 8\left(k - 2d^2\right) > 0. \end{align} \]
$\omega_\text{res}$ ist also die Frequenz maximaler Amplitude. Man beachte den Unterschied zwischen Eigenfrequenz Glg. (2.97) und Resonanzfrequenz Glg. (2.123). Das Resonanzverhalten ist in Abb. 2.2 dargestellt.
Das bisher in diesem Abschnitt betrachtete System hat genau einen Freiheitsgrad, nämlich die generalisierte Auslenkung $x$. Konzeptionell lassen sich jedoch viele der Erkenntnisse auf Systeme mit sehr vielen Freiheitsgraden verallgemeinern. Auch solche komplexen Systeme (Häuser, Schaltkreise, das Klima) haben Eigenmoden.